







-
R$ 16,15

-
R$ 16,15

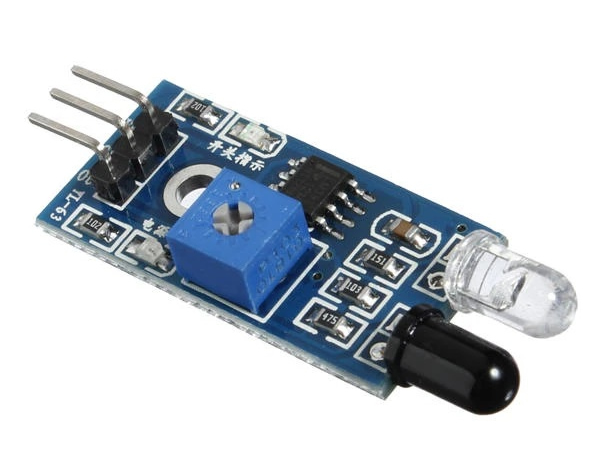
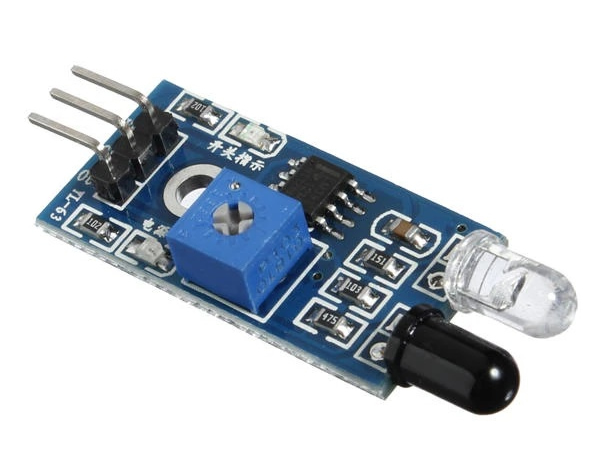
O Sensor de Obstáculo Infravermelho LM393 é um dispositivo eletrônico amplamente utilizado em projetos de robótica e automação para detectar a presença de objetos ou obstáculos em seu caminho. Ele é composto por um emissor e um receptor infravermelho, que trabalham juntos para determinar a distância e a presença de um objeto.
O LM393 é um chip de amplificação comparador de tensão utilizado no sensor. Ele possui duas entradas de sinal, uma entrada de referência e uma saída digital que indica a presença ou ausência de um objeto. A saída do sensor é tipicamente conectada a um microcontrolador ou outro dispositivo eletrônico para processar a informação detectada.
INCLUSO NO PACOTE
✔ 1 Sensor de Obstáculo Infravermelho/ Reflexão LM393 para Arduino.
CARACTERÍSTICAS
✔ Descrição da Interface (3 fios);
✔ A escala da detecção do sensor pode ser obtida ajustando o potenciômetro;
✔ 1 VCC: Tensão 3.3V-5V externo (pode ser conectado diretamente a 5v e 3.3v MCU MCU)
✔ 2 GND: GND externo
✔ 3 OUT: Interfaces de pequena placa de saída digital (0 e 1)
✔ Tipo de saída: Digital, 1 ou 0;
✔ Nível lógico da saída quando obstáculo detectado: Nível lógico BAIXO;
✔ Circuito integrado controlador: LM393;
✔ Ângulo de detecção: 35º;
✔ LED’s: Verde – Sensor ativado, Vermelho – Sensor alimentado;
✔ Conexão: Conector macho header 2.54mm (VCC, GND, Saída);
✔ Dimensões: 32mm x 14mm.
💖 O princípio de funcionamento do Sensor de Obstáculo Infravermelho LM393 baseia-se no uso de luz infravermelha. O emissor infravermelho emite um feixe de luz infravermelha invisível e o receptor infravermelho recebe a luz refletida pelos objetos próximos. Quando um objeto está presente no caminho do feixe de luz, a luz é refletida de volta para o receptor, ativando o sensor.
O sinal recebido pelo receptor infravermelho é convertido em um sinal elétrico proporcional à intensidade da luz detectada. Esse sinal é amplificado e comparado a um valor de referência definido pelo usuário. Se o sinal amplificado for maior que o valor de referência, a saída do sensor é alterada para um estado lógico alto (1), indicando a presença de um obstáculo. Caso contrário, a saída permanece em um estado lógico baixo (0), indicando a ausência de um obstáculo.
O Sensor de Obstáculo Infravermelho LM393 é amplamente utilizado em aplicações de robótica, como robôs seguidores de linha, robôs evitadores de obstáculos e robôs autônomos. Ele também pode ser aplicado em sistemas de automação, como portas automáticas que precisam detectar a presença de pessoas ou objetos antes de fecharem.
Uma vantagem desse sensor é sua simplicidade de uso e baixo custo. No entanto, é importante destacar que sua detecção pode ser afetada por condições ambientais, como a iluminação infravermelha ambiente ou superfícies refletivas. Portanto, em algumas situações, é necessário tomar medidas adicionais para evitar falsos positivos ou falsos negativos.
Em resumo, o Sensor de Obstáculo Infravermelho LM393 é um componente eletrônico amplamente utilizado para detecção de obstáculos em projetos de robótica e automação. Ele opera com base na emissão e recepção de luz infravermelha e fornece uma saída digital que indica a presença ou ausência de um objeto em seu caminho.
Produtos relacionados
-
 Sensor Reflexivo Infravermelho IR Módulo Seguidor de linha TCRT5000 para Arduino ou Robôs AutônomosR$ 19,70ou R$ 18,72 via Pix
Sensor Reflexivo Infravermelho IR Módulo Seguidor de linha TCRT5000 para Arduino ou Robôs AutônomosR$ 19,70ou R$ 18,72 via Pix -
 Kit Arduino Sensor de Ré - Educação Steam
Kit Arduino Sensor de Ré - Educação SteamR$ 245,00R$ 197,00até 3x de R$ 65,66 sem jurosou R$ 187,15 via Pix20% Desconto



Somos uma empresa de tecnologia educacional especializada em kits de robótica educacional, circuitos e projetos maker voltados para a educação STEAM. Desenvolvemos materiais didáticos que estimulam a criatividade, o raciocínio lógico e a aprendizagem mão na massa, conectando ciência, matemática, engenharia, artes e tecnologia de forma prática e significativa. Nossos kits são alinhados à BNCC e permitem que estudantes explorem conceitos fundamentais por meio da construção de robôs criativos.


{kind=link}
S.A ROBÓTICA EDUCACIONAL BRASIL LTDA - CNPJ: 13.736.003/0001-30 © Todos os direitos reservados. 2026